Throw-in Type Liquid Level Transmitter
Gravity
Table of contents
Documentation
The document contains an overview and the code for the sensor https://media.digikey.com/pdf/Data%20Sheets/DFRobot%20PDFs/KIT0139_Web.pdf
Excel doc (temporary) Gravity Sensor Calibration Sheet
Product link https://www.dfrobot.com/product-1863.html
Summary
Cable Length: 5m
Measuring Range: 0-5m
Overall Accuracy: 0.5% Output Signal: 4-20mA
Operating Voltage: 12-36V
Operating Temperature: -20-70
Overload Capacity: 300%
Service Life: 1*10^8 Pressure Circulation (25)
Material: 316L stainless steel
Protection Class: IP68
Important notes
The formula that is used in the documentation does not work correctly. We had to come up with our own way of measuring the depth based on the converted ADC voltage, using a linear equation. The sensor’s baseline measurement is 0.48v at 0m depth, and the first measurement is registered at 6cm deep. For the initial purpose of testing, we had no access to a depth greater than 70cm. However, the rate of change was consistent from 6.00 cm to 70.00 cm. The sensor requires an external 12-36v power supply (refer to schematics below) 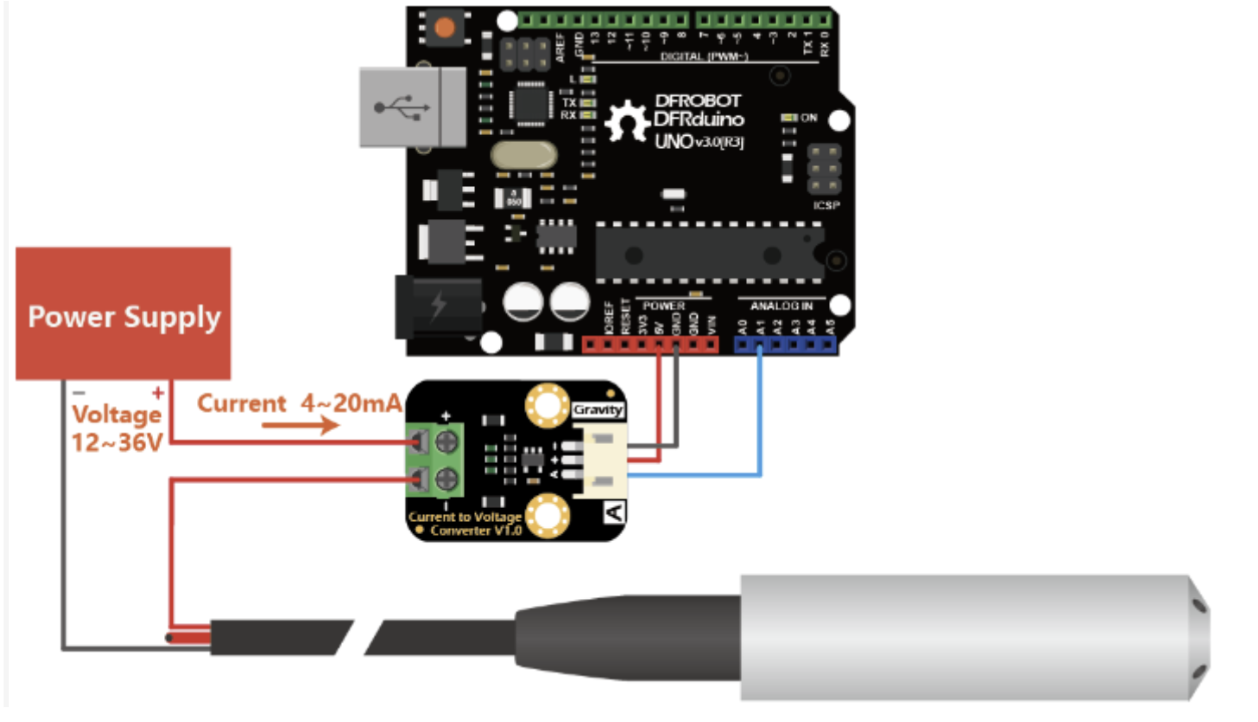 Based on the reading, we extrapolated the data using the following two formulas (where x is the ADC voltage):
Based on the reading, we extrapolated the data using the following two formulas (where x is the ADC voltage):
float adc_voltage = (float)adc_value / max_adc_value * v_ref_millivolts / 1000;
float depth = (35 * adc_voltage) + (-12.8); // inch // Replace with your own depth conversion equation
float depthMM = depth * 2.54; // mm
The sensor requires a converter 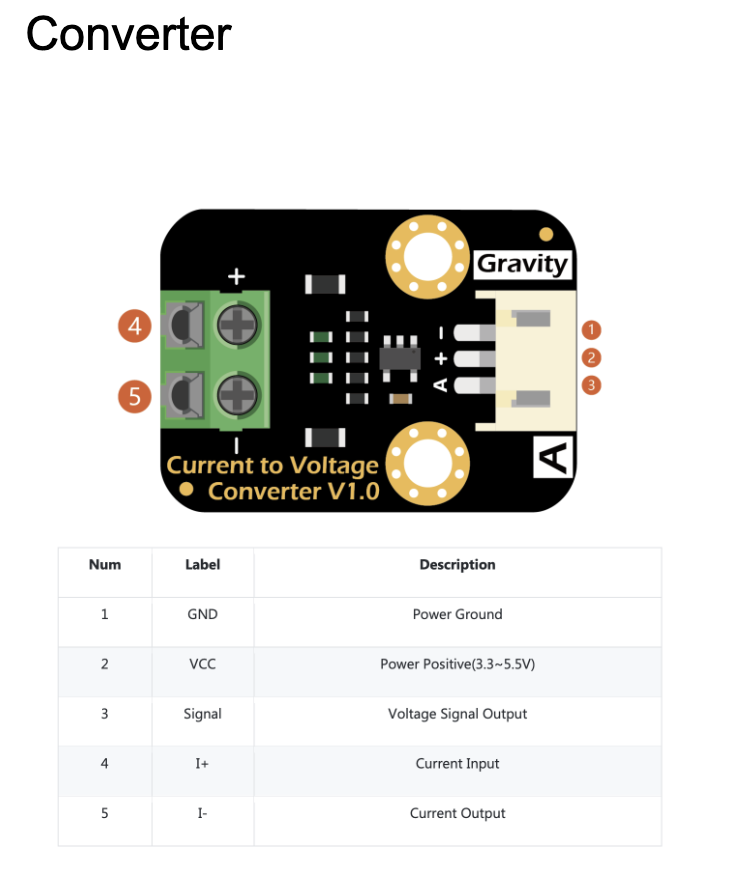
JSON
Publish Topic: device/reading/sensor/lvl
{
value: # float
}
Subscribe Topic: device/config/sensor/lvl
{
state: # binary
}